Wie alles anfing: Im November 2016 fragten mich zwei Schüler in meinem Arduino-Kurs an, ob ich sie beim Bau eines Quadrokopters betreuen könnte. Bis dato wusste ich kaum mehr über diese Flieger, als dass sie dem Namen nach wohl über vier Propeller verfügen. Nachdem ich mich – hauptsächlich bei YouTube – informiert hatte, sagte ich zu. Danach wurde mir schnell klar, dass ich kaum meiner Aufgabe als Betreuer nachkommen könnte, wenn ich nicht auch selber mal ein solches Fluggerät gebaut hätte. Die „Hardware“ erschien mir – auch dank einer Anleitung von Joop Brokking – recht unproblematisch. Aber die Software der Flugsteuerung, dass wäre doch etwas interessantes für die Eigenentwicklung! In diesem Gebiet war ich noch gar nicht unterwegs. So ist dann im Folgejahr 2017 das „Flux“-Programm entstanden, sozusagen parallel mit dem Quadrokopter selber. Im August war es dann so weit und mein erstes selbstgebautes Fluggerät konnte unter freiem Himmel abheben.
Sowohl der Quadrokopter als auch das Flux-Programm sind als Minimallösung konzipiert, um die Grundlagen möglichst klar darzustellen. Was nicht heißt, dass an wichtigen Dingen, wie z.B. Diagnosefunktionen, gespart wurde. Von Anfang an schwebte mir vor, mit dem Projekt eine gute Ausgangsbasis für Weiterentwicklungen durch andere Bastler zu schaffen. Das verlangt allerdings eine saubere, nachvollziehbare Dokumentation – aber so etwas schreibe ich ja auch gerne. Noch weiß ich nicht, wer sich dafür interessieren könnte. Doch falls jemand Lust und Zeit hat, sich die Sache einmal näher anzuschauen: Hier gibt es das Programm und hier die Dokumentation zum herunterladen. Natürlich kann ich keine Garantie für ein fehlerfreies Funktioneren noch irgendwelche Haftung für Schäden übernehmen. Aus eigener Erfahrung muss ich warnen: Quadrokopter können ausgesprochen verletzend sein und sie stürzen bisweilen ab, wie bei meinem Jungfernflug zu besichtigen! Darum ist eine gute Versicherung nicht nur rechtlich vorgeschrieben sondern beruhigt auch die Nerven.
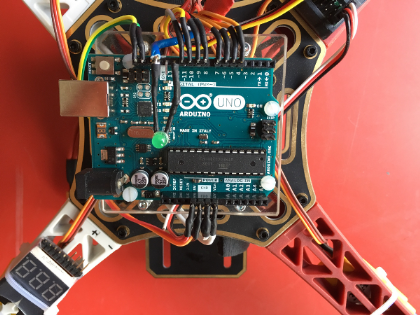
Ursache der anfänglichen Abstürze war eine Lockerung der Muttern, mit denen die IMU (Inertial Measurement Unit) befestigt ist. Wackelt dieser Gleichgewichtssinn („Innenohr“) hin und her, wird dem Quadrokopter sozusagen schwindlig und er kann seine Balance nicht halten. Nachdem dieses Problem behoben war, konnte ich die Lageregelung weiter optimieren und der Quadrokopter wurde doch recht flugtauglich, was in dieser Video-Sequenz zu besichtigen ist.
Theoretische Überlegungen zum Flug eines Quadrokopters habe ich hier zusammengetragen.
Ich freue mich über jedes Feedback zu meiner „Jahresarbeit“ 2017, insbesondere zu deren Fehlern und Schwachstellen!
Es existiert eine Unmenge Material über Quadkopter im Netz, darum hier eine kleine Auswahl zum Einstieg: